# 一、什么是弹性力和阻尼力
弹簧力方向与位移变化量的大小成正比,方向相反
阻尼力方向与速度变化量的大小成正比,方向相反
# 二、3 自由度弹簧 - 阻尼器 - 质量系统
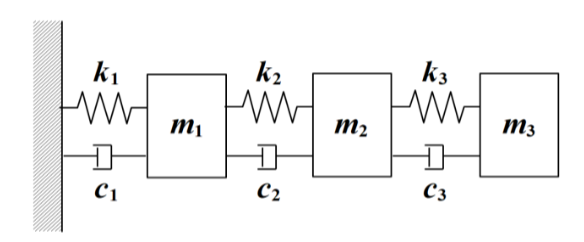
3 自由度弹簧 - 阻尼 - 质量系统结构图如下图所示
![]()
使用数轴建模法建立的动力学方程为
⎩⎪⎨⎪⎧m1x¨1=−k1x1−c1x˙1−k2(x1−x2)−c2(x˙1−x˙2)+u1m2x¨2=k2(x1−x2)+c2(x˙1−x˙2)−k3(x2−x3)−c3(x˙2−x˙3)+u2m3x¨3=k3(x2−x3)+c3(x˙2−x˙3)+u3
其中 x1 ,x2 ,x3 分别为各质量块相对初始位置向右的位移,u1 、u2 、u3 分别为作用在各质量块上方向向右的力,基于该动力学方程可建立系统的状态空间方程为
⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧⎣⎢⎢⎢⎢⎢⎢⎢⎡x˙1x˙2x˙3x¨1x¨2x¨3⎦⎥⎥⎥⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎡000−m1k1+k2m2k20000m1k2−m2k2+k3m3k30000m2k3−m3k3100−m1c1+c2m2c20010m1c2−m2c2+c3m3c30010m2c3−m3c3⎦⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎢⎢⎢⎡x1x2x3x˙1x˙2x˙3⎦⎥⎥⎥⎥⎥⎥⎥⎤+⎣⎢⎢⎢⎢⎢⎢⎢⎡000m11000000m21000000m31⎦⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎡u1u2u3⎦⎥⎤y=[000010]⎣⎢⎢⎢⎢⎢⎢⎢⎡x1x2x3x˙1x˙2x˙3⎦⎥⎥⎥⎥⎥⎥⎥⎤
# 三、matlab 程序编写
在 matlab 程序编写中,直接编写 A、B 两个矩阵过复杂,可以建立中间变量来进行状态空间矩阵的编写,记
M=⎣⎢⎡m1000m2000m3⎦⎥⎤C=⎣⎢⎡c1+c2−c20−c2c2+c3−c30−c3c3⎦⎥⎤K=⎣⎢⎡k1+k2−k20−k2k2+k3−k30−k3k3⎦⎥⎤
则矩阵 A、B 可记为
A=[0−M−1KI−M−1C]B=[0M−1]