参考链接:https://blog.csdn.net/weixin_51772802/article/details/128767706、https://blog.csdn.net/tauyangdao/article/details/108058222
# 一、什么是 LQR
在讨论 LQR 基本原理时,被控对象一般都是线性定常系统,即系统状态不随时间变化的系统,状态空间表达式如下:
LQR 控制通过设定一个线性反馈控制器,用以得到输入参数 和状态变量 的关系,全状态反馈控制器的状态空间描述框图如下图所示:
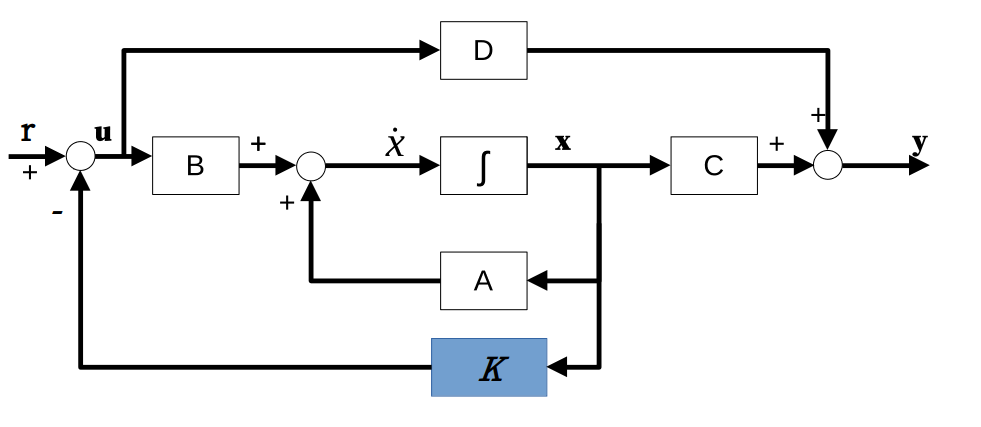
从而第一行可以写为
让系统稳定的条件是矩阵 的特征值的实部均为负数,我们可以手动选择几个满足上述条件的特征值,然后反解,从而得到控制器。而 LQR 的出现,就是为了让几个参数的选择更为合理,从而使得控制器控制效果更好。
其实现方式正是通过设计代价函数 实现的。无限时间的 LQR 问题设计的成本代价泛函 为:
一般来说, 阵和 阵为对角阵,分别确定了状态变量 和输入参数 的权重。对角阵上的值越大说明我们设计时对于该量的重视程度越大,即希望这个量在变化过程中保持较小的值,换种说法就是对于该量的 “惩罚” 越大。我们的设计目标就是得到一系列的控制序列使代价累积的最小。上式的推导过程可见下图:
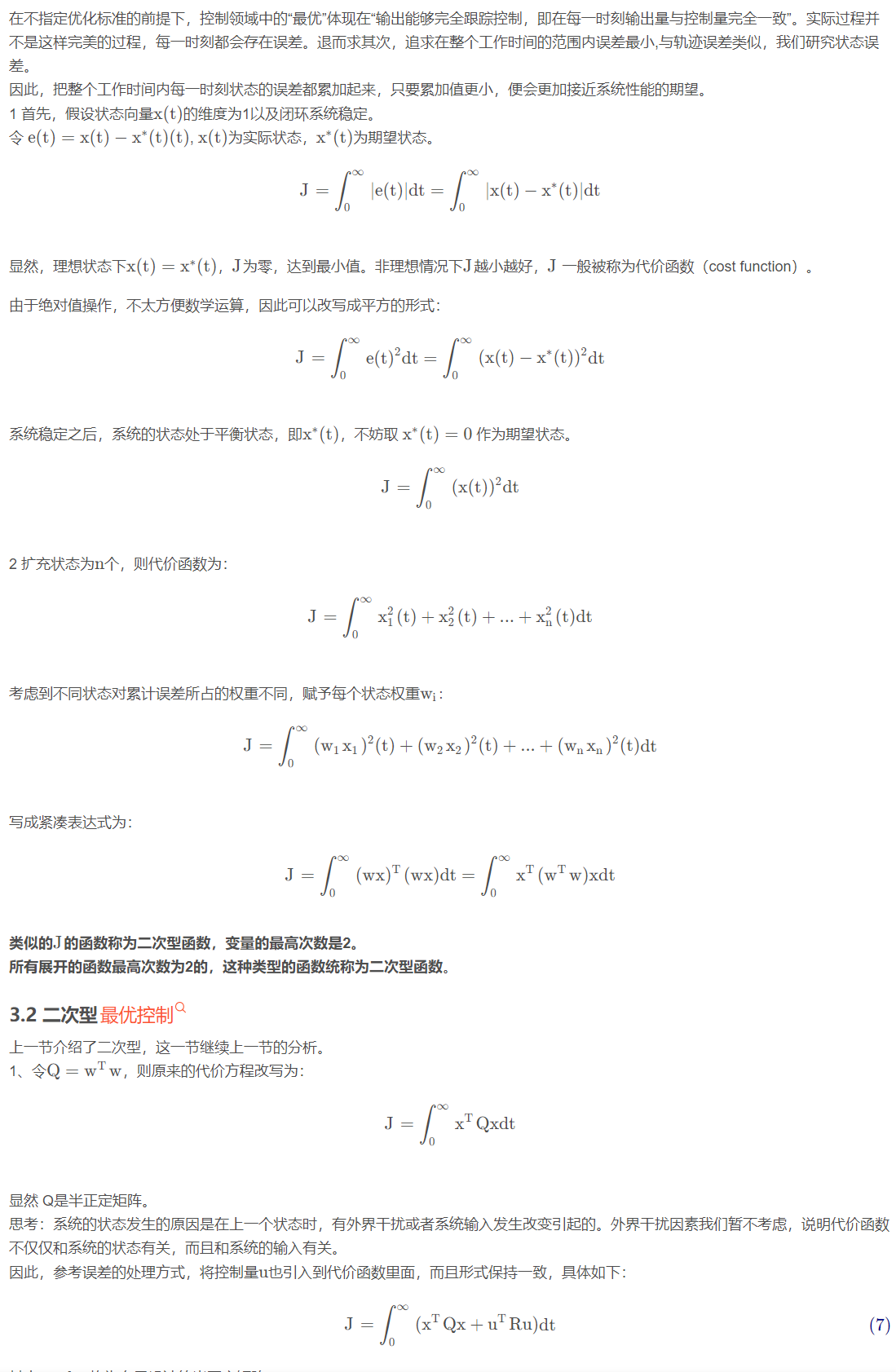
因此,问题就转变为了选择合适的反馈矩阵 使得代价函数 最小。
在 matlab 中可以直接使用相关命令矩阵得到 阵
K=lqr(A,B,Q,R) |
# 二、LQR 控制器的设计步骤
- (1)根据期望状态,初步设计好 阵和 阵;
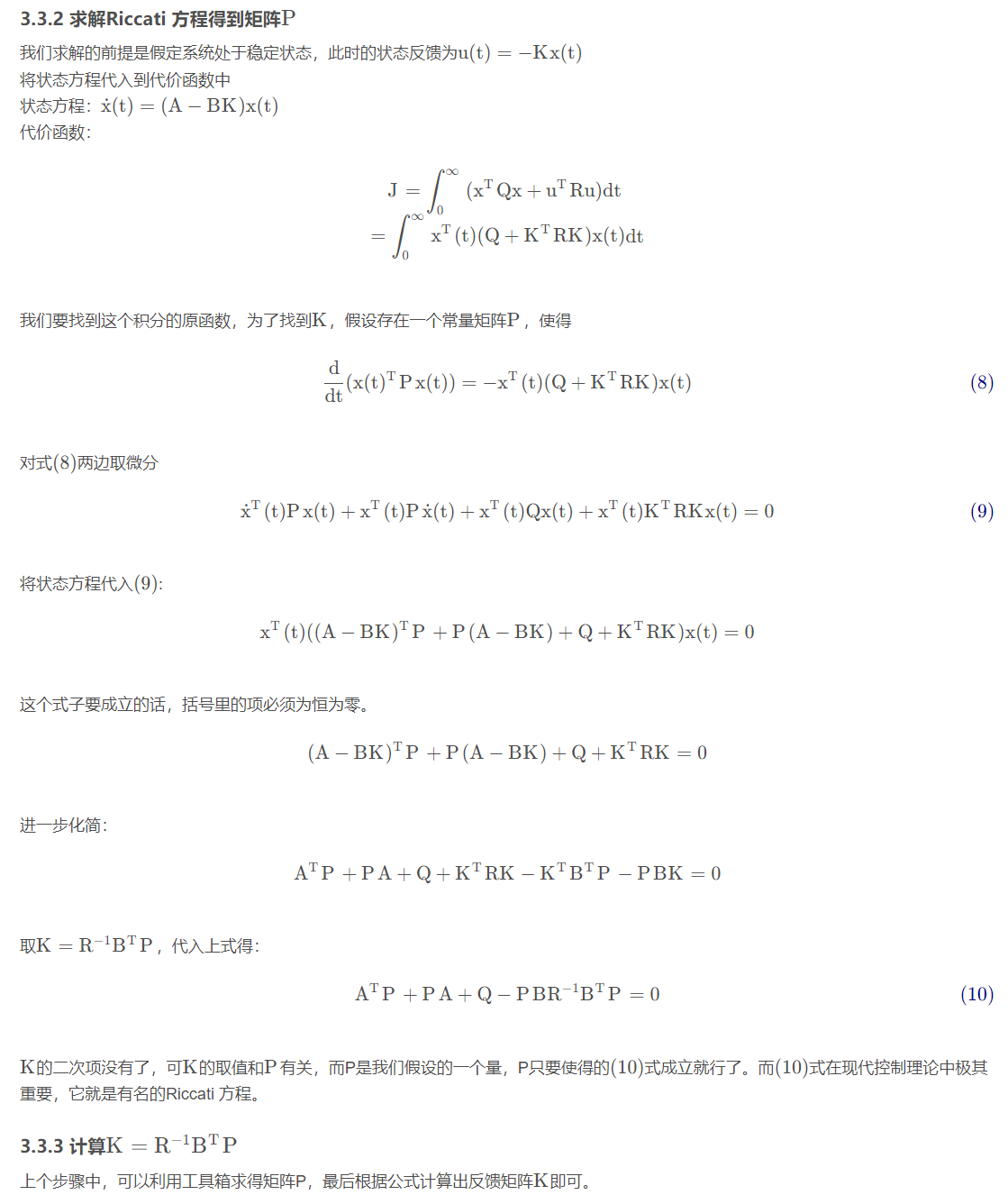
- (2)根据代数
Riccati方程求解 P 矩阵(大多数情况使用数值解法,很少情况可以求解析解) - (3)根据,得到反馈矩阵 的表达式,从而得到最优控制序列。
其中,代数Riccati方程表达式如下:
反馈矩阵 的表达式如下:
# 三、Riccati 方程推导过程
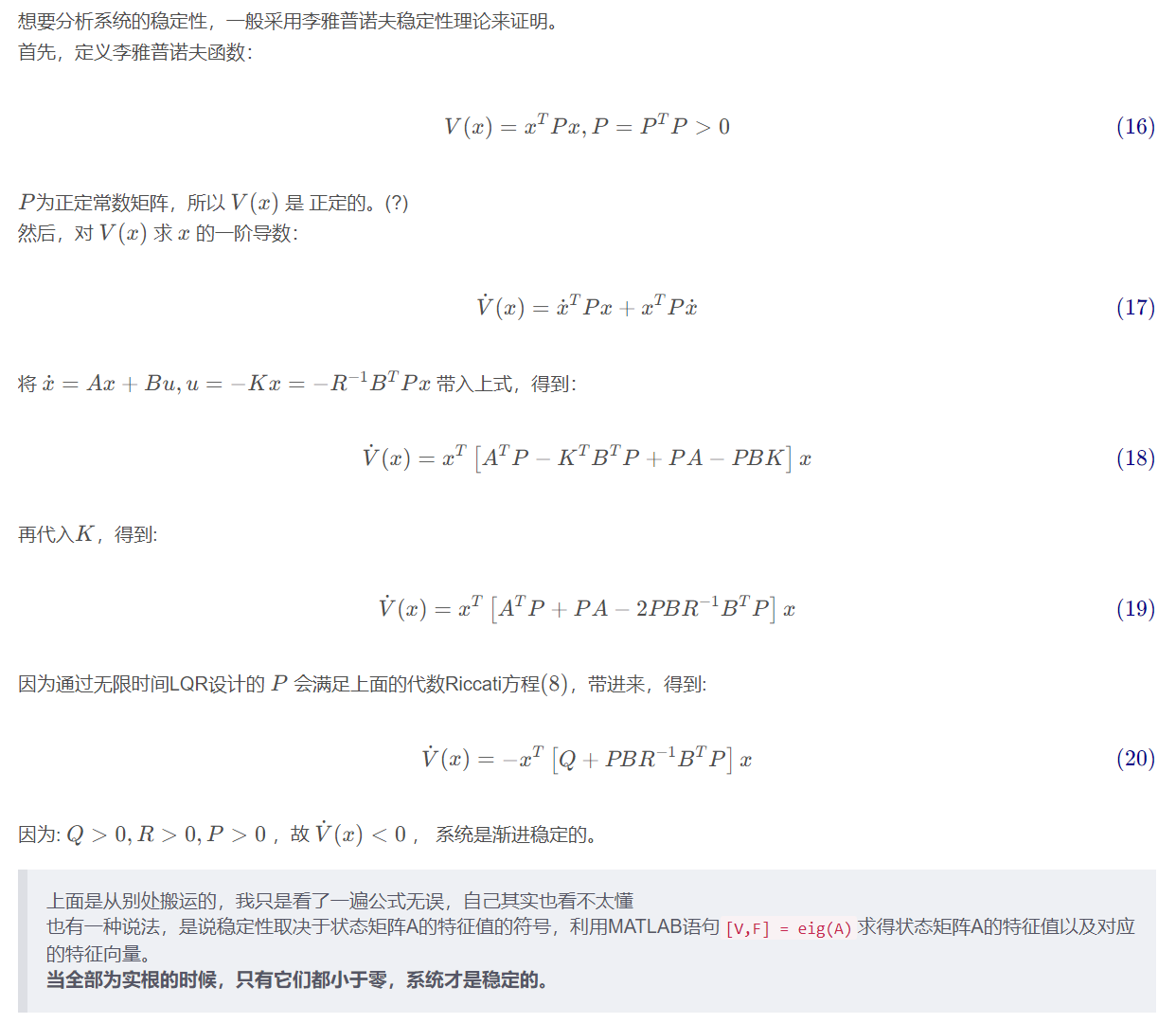
# 四、稳定性分析
稳定性分析证明如下所示,需要注意的是,公式 (8) 即为 Riccati 方程。